Embodied Vision Group
Max Planck Independent Research Group for Embodied Vision

Group June 2022

Visual-inertial SLAM

Robotic object manipulation

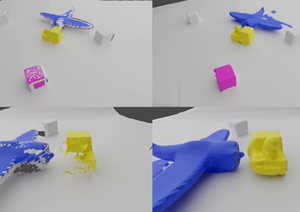
Dynamic scene reconstruction

Learning Dynamics for Planning and Control

Learning based simultaneous localization and mapping with monocular cameras

RGB-D motion segmentation

Predictive modelling of dynamic scenes

3D reconstruction of dynamic scenes

Vision-based autonomous navigation

Simultaneous localization and mapping with RGB-D cameras
We research fundamentals of intelligent embodied agents such as robots that learn to perceive and act through interaction with their environment. Our group investigates novel methods for learning the basic physical 3D understanding of dynamic environments up to complex tasks such as autonomous navigation and object manipulation from raw sensory measurements and environment interactions. Besides vision as a primary sensing modality, we also consider further sensing modalities such as tactile or proprioceptive sensing.
Please contact Joerg Stueckler by email if you are interested in possibilities for internships or Master thesis projects (please include your CV, BSc/MSc transcripts, and a description of your research interests).